Having learned how we represent coordinates systems, we can define how geometries can be described using these coordinate systems. This chapter will explain:
simple features, a standard that describes point, line, and polygon geometries along with operations on them,
operations on geometries,
coverages, functions of space or space-time,
tesselations, sub-divisions of larger regions into sub-regions, and
networks.
Geometries on the sphere are discussed in Chapter 4, rasters and other rectangular sub-divisions of space or space time are discussed in Chapter 6.
3.1 Simple feature geometries
Simple feature geometries are a way to describe the geometries of features. By features we mean things that have a geometry, potentially implicitly some time properties, and further attributes that could include labels describing the thing and/or values quantitatively measuring it. The main application of simple feature geometries is to describe geometries in two-dimensional space by points, lines, or polygons. The “simple” adjective refers to the fact that the line or polygon geometries are represented by sequences of points connected with straight lines that do not self-intersect.
Simple features access is a standard (Herring 2011, 2010; ISO 2004) for describing simple feature geometries. It includes:
a class hierarchy
a set of operations
binary and text encodings
We will first discuss the seven most common simple feature geometry types.
The big seven
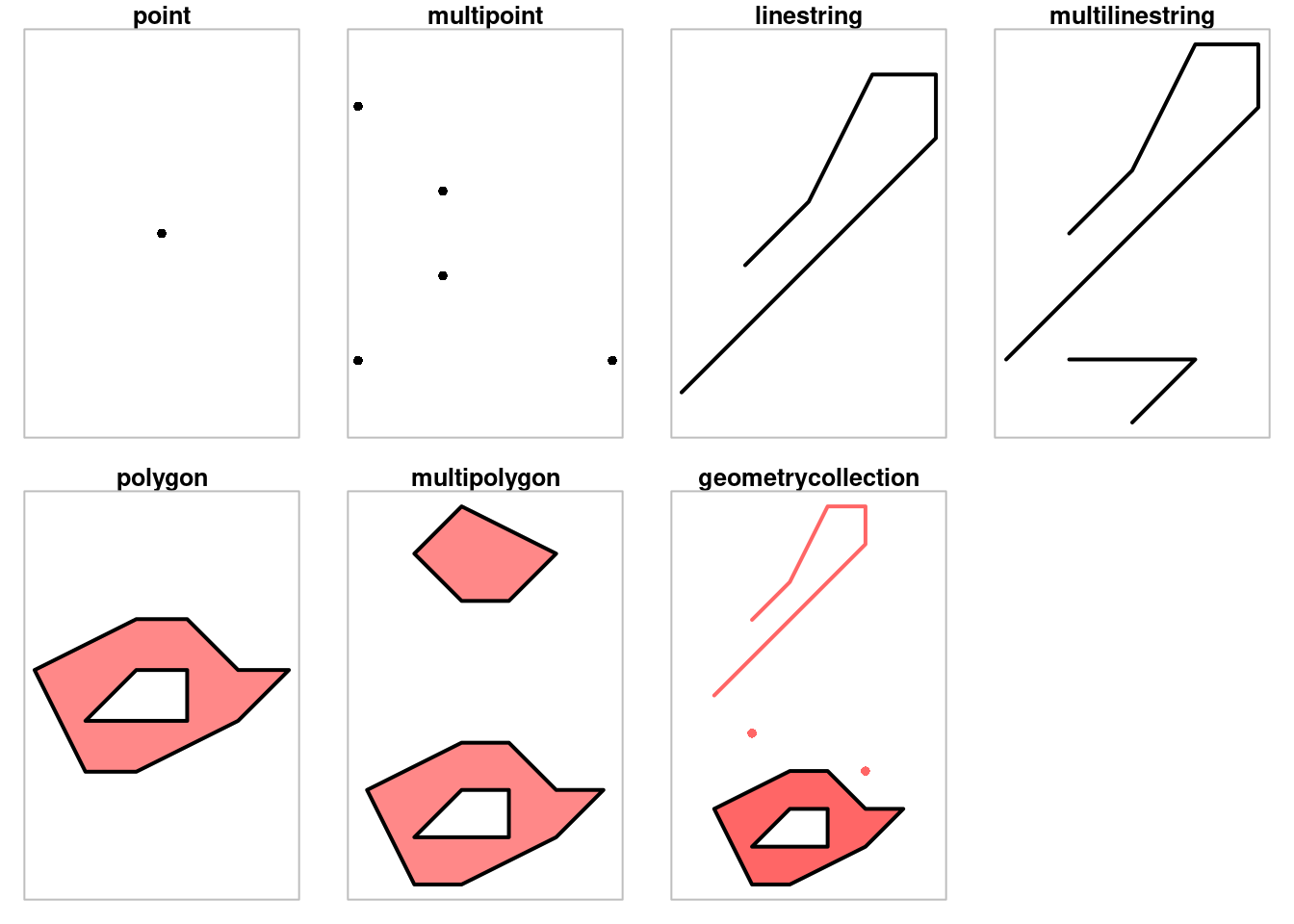
The most common simple feature geometries used to represent a single feature are:
type
description
POINT
single point geometry
MULTIPOINT
set of points
LINESTRING
single linestring (two or more points connected by straight lines)
MULTILINESTRING
set of linestrings
POLYGON
exterior ring with zero or more inner rings, denoting holes
In this representation, coordinates are separated by space, and points by commas. Sets are grouped by parentheses, and separated by commas. Polygons consist of an outer ring followed by zero or more inner rings denoting holes.
Individual points in a geometry contain at least two coordinates: \(x\) and \(y\), in that order. If these coordinates refer to ellipsoidal coordinates, \(x\) and \(y\) usually refer to longitude and latitude, respectively, although sometimes to latitude and longitude (see Section 2.4 and Section 7.7.6).
Simple and valid geometries, ring direction
Linestrings are called simple when they do not self-intersect:
Valid polygons and multi-polygons obey all of the following properties:
polygon rings are closed (the last point equals the first)
polygon holes (inner rings) are inside their exterior ring
polygon inner rings maximally touch the exterior ring in single points, not over a line
a polygon ring does not repeat its own path
in a multi-polygon, an external ring maximally touches another exterior ring in single points, not over a line
If this is not the case, the geometry concerned is not valid. Invalid geometries typically cause errors when they are processed, but they can usually be repaired to make them valid.
A further convention is that the outer ring of a polygon is winded counter-clockwise, while the holes are winded clockwise, but polygons for which this is not the case are still considered valid. For polygons on the sphere, the “clockwise” concept is not very useful: if for instance we take the equator as polygon, is the Northern Hemisphere or the Southern Hemisphere “inside”? The convention taken here is to consider the area on the left while traversing the polygon is considered the polygon’s inside (see also Section 7.3).
Z and M coordinates
In addition to X and Y coordinates, single points (vertices) of simple feature geometries may have:
a Z coordinate, denoting altitude, and/or
an M value, denoting some “measure”
The M attribute shall be a property of the vertex. It sounds attractive to encode a time stamp in it for instance to pack movement data (trajectories) in LINESTRINGs. These become however invalid (or “non-simple”) once the trajectory self-intersects, which happens when only X and Y are considered for self-intersections.
Both Z and M are not found often, and software support to do something useful with them is (still) rare. Their WKT representations are fairly easily understood:
A very important concept in the feature geometry framework is that of the empty geometry. Empty geometries arise naturally when we do geometrical operations (Section 3.2), for instance when we want to know the intersection of POINT (0 0) and POINT (1 1):
and so on, but they all point to the empty set, differing only in their dimension (Section 3.2.2).
Ten further geometry types
There are 10 more geometry types which are more rare, but increasingly find implementation:
type
description
CIRCULARSTRING
The CircularString is the basic curve type, similar to a LineString in the linear world. A single segment requires three points, the start and end points (first and third) and any other point on the arc. The exception to this is for a closed circle, where the start and end points are the same. In this case the second point MUST be the centre of the arc, i.e., the opposite side of the circle. To chain arcs together, the last point of the previous arc becomes the first point of the next arc, just like in LineString. This means that a valid circular string must have an odd number of points greater than 1.
COMPOUNDCURVE
A CompoundCurve is a single, continuous curve that has both curved (circular) segments and linear segments. That means that in addition to having well-formed components, the end point of every component (except the last) must be coincident with the start point of the following component.
A MultiCurve is a 1 dimensional GeometryCollection whose elements are Curves. It can include linear strings, circular strings, or compound strings.
MULTISURFACE
A MultiSurface is a 2 dimensional GeometryCollection whose elements are Surfaces, all using coordinates from the same coordinate reference system.
CURVE
A Curve is a 1 dimensional geometric object usually stored as a sequence of Points, with the subtype of Curve specifying the form of the interpolation between Points
SURFACE
A Surface is a 2 dimensional geometric object
POLYHEDRALSURFACE
A PolyhedralSurface is a contiguous collection of polygons, which share common boundary segments
TIN
A TIN (triangulated irregular network) is a PolyhedralSurface consisting only of Triangle patches.
TRIANGLE
A Triangle is a polygon with three distinct, non-collinear vertices and no interior boundary
CIRCULARSTRING, COMPOUNDCURVE and CURVEPOLYGON are not described in the SFA standard, but in the SQL-MM part 3 standard. The descriptions above were copied from the PostGIS manual.
Text and binary encodings
Part of the simple feature standard are two encodings: a text and a binary encoding. The well-known text encoding, used above, is human-readable. The well-known binary encoding is machine-readable. Well-known binary (WKB) encodings are lossless and typically faster to work with than text encoding (and decoding), and they are used for instance in all communications between R package sf and the GDAL, GEOS, liblwgeom, and s2geometry libraries (Figure 1.7).
3.2 Operations on geometries
Simple feature geometries can be queried for properties, or transformed or combined into new geometries, and combinations of geometries can be queried for further properties. This section gives an overview of the operations entirely focusing on geometrical properties. Chapter 5 focuses on the analysis of non-geometrical feature properties, in relationship to their geometries. Some of the material in this section appeared in Pebesma (2018).
We can categorise operations on geometries in terms of what they take as input, and what they return as output. In terms of output we have operations that return:
predicates: a logical asserting a certain property is TRUE
measures: a quantity (a numeric value, possibly with measurement unit)
transformations: newly generated geometries
and in terms of what they operate on, we distinguish operations that are:
unary when they work on a single geometry
binary when they work on pairs of geometries
n-ary when they work on sets of geometries
Unary predicates
Unary predicates describe a certain property of a geometry. The predicates is_simple, is_valid, and is_empty return respectively whether a geometry is simple, valid, or empty. Given a coordinate reference system, is_longlat returns whether the coordinates are geographic or projected. is(geometry, class) checks whether a geometry belongs to a particular class.
Binary predicates and DE-9IM
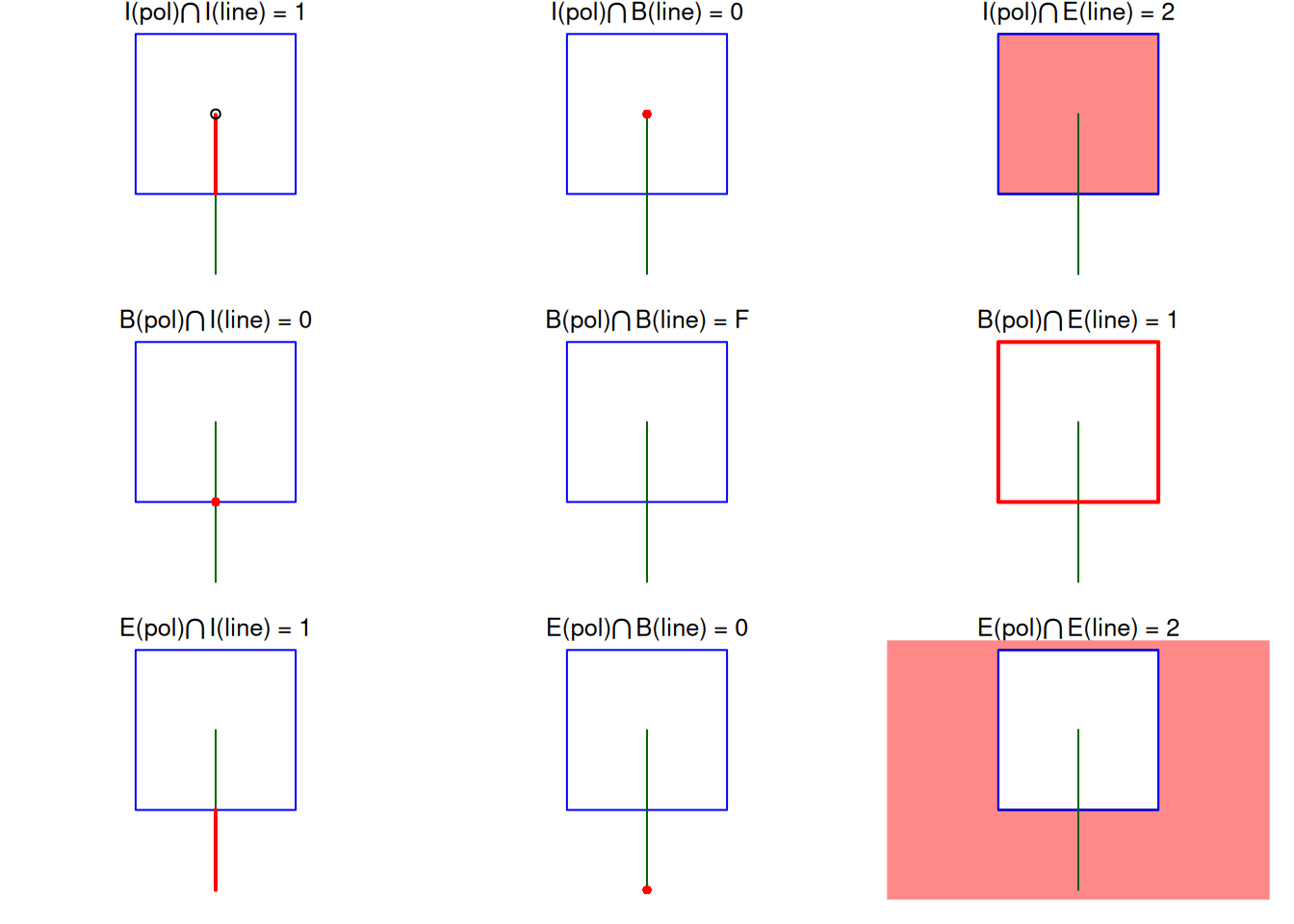
The Dimensionally Extended Nine-Intersection Model (DE-9IM, Clementini, Di Felice, and Oosterom 1993; Egenhofer and Franzosa 1991) is a model that describes the qualitative relation between any two geometries in two-dimensional space (\(R^2\)). Any geometry has a dimension value that is:
0 for points,
1 for linear geometries,
2 for polygonal geometries, and
F (false) for empty geometries
Any geometry also has an inside (I), a boundary (B), and an exterior (E); these roles are obvious for polygons, however, for:
lines the boundary is formed by the end points, and the inside by all non-end points on the line
points have a zero-dimensional inside but no boundary
Code
library(sf)polygon<-po<-st_polygon(list(rbind(c(0,0), c(1,0), c(1,1), c(0,1), c(0,0))))p0<-st_polygon(list(rbind(c(-1,-1), c(2,-1), c(2,2), c(-1,2), c(-1,-1))))line<-li<-st_linestring(rbind(c(.5, -.5), c(.5, 0.5)))s<-st_sfc(po, li)par(mfrow =c(3,3))par(mar =c(1,1,1,1))# "1020F1102"# 1: 1plot(s, col =c(NA, 'darkgreen'), border ='blue', main =expression(paste("I(pol)",intersect(),"I(line) = 1")))lines(rbind(c(.5,0), c(.5,.495)), col ='red', lwd =2)points(0.5, 0.5, pch =1)# 2: 0plot(s, col =c(NA, 'darkgreen'), border ='blue', main =expression(paste("I(pol)",intersect(),"B(line) = 0")))points(0.5, 0.5, col ='red', pch =16)# 3: 2plot(s, col =c(NA, 'darkgreen'), border ='blue', main =expression(paste("I(pol)",intersect(),"E(line) = 2")))plot(po, col ='#ff8888', add =TRUE)plot(s, col =c(NA, 'darkgreen'), border ='blue', add =TRUE)# 4: 0plot(s, col =c(NA, 'darkgreen'), border ='blue', main =expression(paste("B(pol)",intersect(),"I(line) = 0")))points(.5, 0, col ='red', pch =16)# 5: Fplot(s, col =c(NA, 'darkgreen'), border ='blue', main =expression(paste("B(pol)",intersect(),"B(line) = F")))# 6: 1plot(s, col =c(NA, 'darkgreen'), border ='blue', main =expression(paste("B(pol)",intersect(),"E(line) = 1")))plot(po, border ='red', col =NA, add =TRUE, lwd =2)# 7: 1plot(s, col =c(NA, 'darkgreen'), border ='blue', main =expression(paste("E(pol)",intersect(),"I(line) = 1")))lines(rbind(c(.5, -.5), c(.5, 0)), col ='red', lwd =2)# 8: 0plot(s, col =c(NA, 'darkgreen'), border ='blue', main =expression(paste("E(pol)",intersect(),"B(line) = 0")))points(.5, -.5, col ='red', pch =16)# 9: 2plot(s, col =c(NA, 'darkgreen'), border ='blue', main =expression(paste("E(pol)",intersect(),"E(line) = 2")))plot(p0/po, col ='#ff8888', add =TRUE)plot(s, col =c(NA, 'darkgreen'), border ='blue', add =TRUE)
Figure 3.2: DE-9IM: intersections between the interior, boundary, and exterior of a polygon (rows) and of a linestring (columns) indicated by red
Figure 3.2 shows the intersections between the I, B, and E components of a polygon and a linestring indicated by red; the sub-plot title gives the dimension of these intersections (0, 1, 2 or F). The relationship between the polygon and the line geometry is the concatenation of these dimensions:
where the first three characters are associated with the inside of the first geometry (polygon): Figure 3.2 is summarised row-wise. Using this ability to express relationships, we can also query pairs of geometries about particular conditions expressed in a mask string. As an example, the string "*0*******" would evaluate TRUE when the second geometry has one or more boundary points in common with the interior of the first geometry; the symbol * standing for “any dimensionality” (0, 1, 2 or F). The mask string "T********" matches pairs of geometry with intersecting interiors, where the symbol T stands for any non-empty intersection of dimensionality 0, 1, or 2.
Binary predicates are further described using normal-language verbs, using DE-9IM definitions. For instance, the predicate equals corresponds to the relationship "T*F**FFF*". If any two geometries obey this relationship, they are (topologically) equal, but may have a different ordering of nodes.
A list of binary predicates, with their meaning for non-empty geometries:
predicate
meaning of A predicate B
inverse of
contains
B has no points in the exterior of A and the insides of A and B have at least one point in common
within
contains_properly
A contains B and B has no points in common with the boundary of A
covers
B has no points in the exterior of A
covered_by
covered_by
Inverse of covers
covers
crosses
A and B have some but not all interior points in common
disjoint
A and B have no points in common
intersects
equals
A and B are topologically equal: node order or number of nodes may differ; identical to A contains B and A within B
equals_exact
A equal B and A and B have identical node order
intersects
A and B are not disjoint
disjoint
is_within_distance
the shortest distance from A to B is within a given distance
within
A has no points in the exterior of B, and the insides of A and B have at least one point in common
contains
touches
A and B have at least one boundary point but no interior points in common
overlaps
A and B have the same dimension and some but not all points in common; the dimension of the common points is identical to that of A and B
relate
Given a mask string, return whether A relate B adheres to its pattern
The Wikipedia DE-9IM page provides the relate patterns for each of these verbs. They are important to check out; for instance covers and contains (and their inverses) are often not completely intuitive:
if A contains B, B has no points in common with the exterior or boundary of A
if A covers B, B has no points in common with the exterior of A
This implies for instance that a polygon covers its own boundary, but does not contain it.
Unary measures
Unary measures return a measure or quantity that describes a property of the geometry:
measure
returns
dimension
0 for points, 1 for linear, 2 for polygons, possibly NA for empty geometries
area
the area of a geometry
length
the length of a linear geometry
Binary measures
distance returns the distance between pairs of geometries. The qualitative measure relate (without mask) gives the relation pattern. A description of the geometrical relationship between two geometries is given in Section 3.2.2.
Unary transformers
Unary transformations work on a per-geometry basis, and return for each geometry a new geometry.
transformer
returns a geometry …
centroid
of type POINT with the geometry’s centroid
buffer
that is larger (or smaller) than the input geometry, depending on the buffer size
jitter
that was moved in space a certain amount, using a bivariate uniform distribution
wrap_dateline
cut into pieces that no longer cover or cross the dateline
boundary
with the boundary of the input geometry
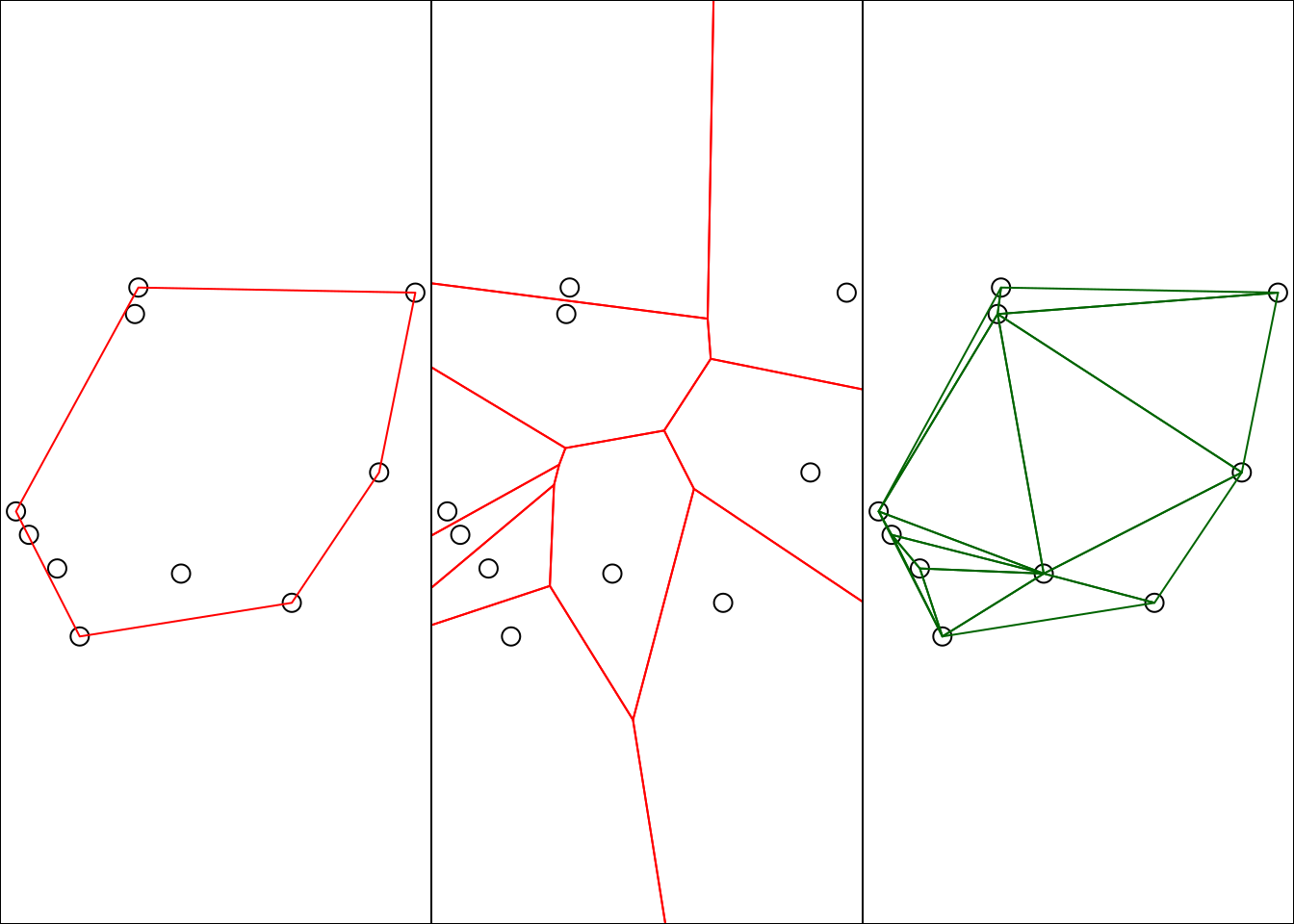
convex_hull
that forms the convex hull of the input geometry (Figure 3.3)
line_merge
after merging connecting LINESTRING elements of a MULTILINESTRING into longer LINESTRINGs.
make_valid
that is valid
node
with added nodes to linear geometries at intersections without a node; only works on individual linear geometries
point_on_surface
with a (arbitrary) point on a surface
polygonize
of type polygon, created from lines that form a closed ring
segmentize
a (linear) geometry with nodes at a given density or minimal distance
simplify
simplified by removing vertices/nodes (lines or polygons)
split
that has been split with a splitting linestring
transform
transformed or convert to a new coordinate reference system (Chapter 2)
triangulate
with Delauney triangulated polygon(s) (Figure 3.3)
voronoi
with the Voronoi tessellation of an input geometry (Figure 3.3)
zm
with removed or added Z and/or M coordinates
collection_extract
with sub-geometries from a GEOMETRYCOLLECTION of a particular type
Figure 3.3: For a set of points, left: convex hull (red); middle: Voronoi polygons; right: Delauney triangulation
Binary transformers
Binary transformers are functions that return a geometry based on operating on a pair of geometries. They include:
function
returns
infix operator
intersection
the overlapping geometries for pair of geometries
&
union
the combination of the geometries; removes internal boundaries and duplicate points, nodes or line pieces
|
difference
the geometries of the first after removing the overlap with the second geometry
/
sym_difference
the combinations of the geometries after removing where they intersect; the negation (opposite) of intersection
%/%
N-ary transformers
N-ary transformers operate on sets of geometries. union can be applied to a set of geometries to return its geometrical union. Otherwise, any set of geometries can be combined into a MULTI-type geometry when they have equal dimension, or else into a GEOMETRYCOLLECTION. Without unioning, this may lead to a geometry that is not valid, for instance when two polygon rings have a boundary line in common.
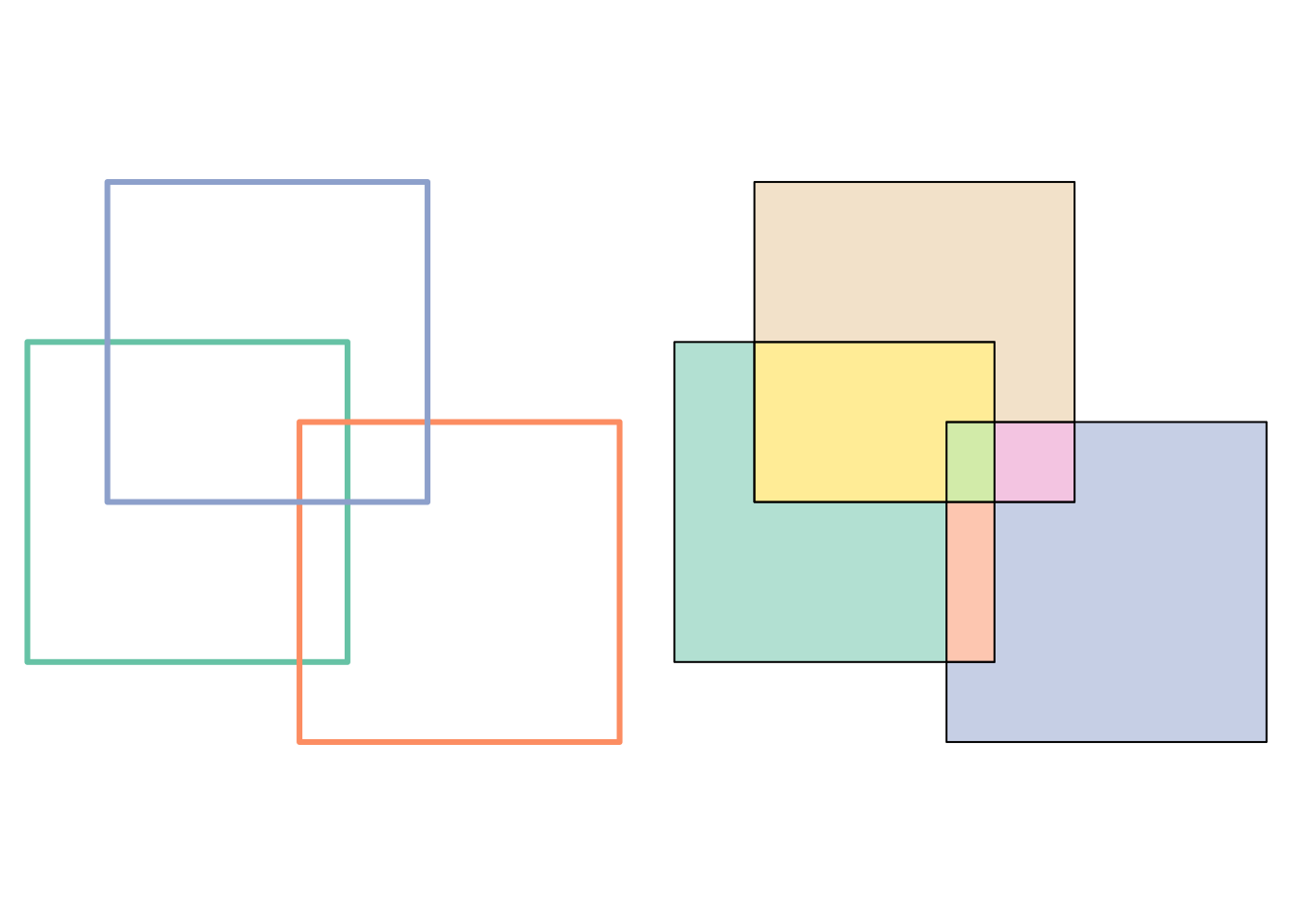
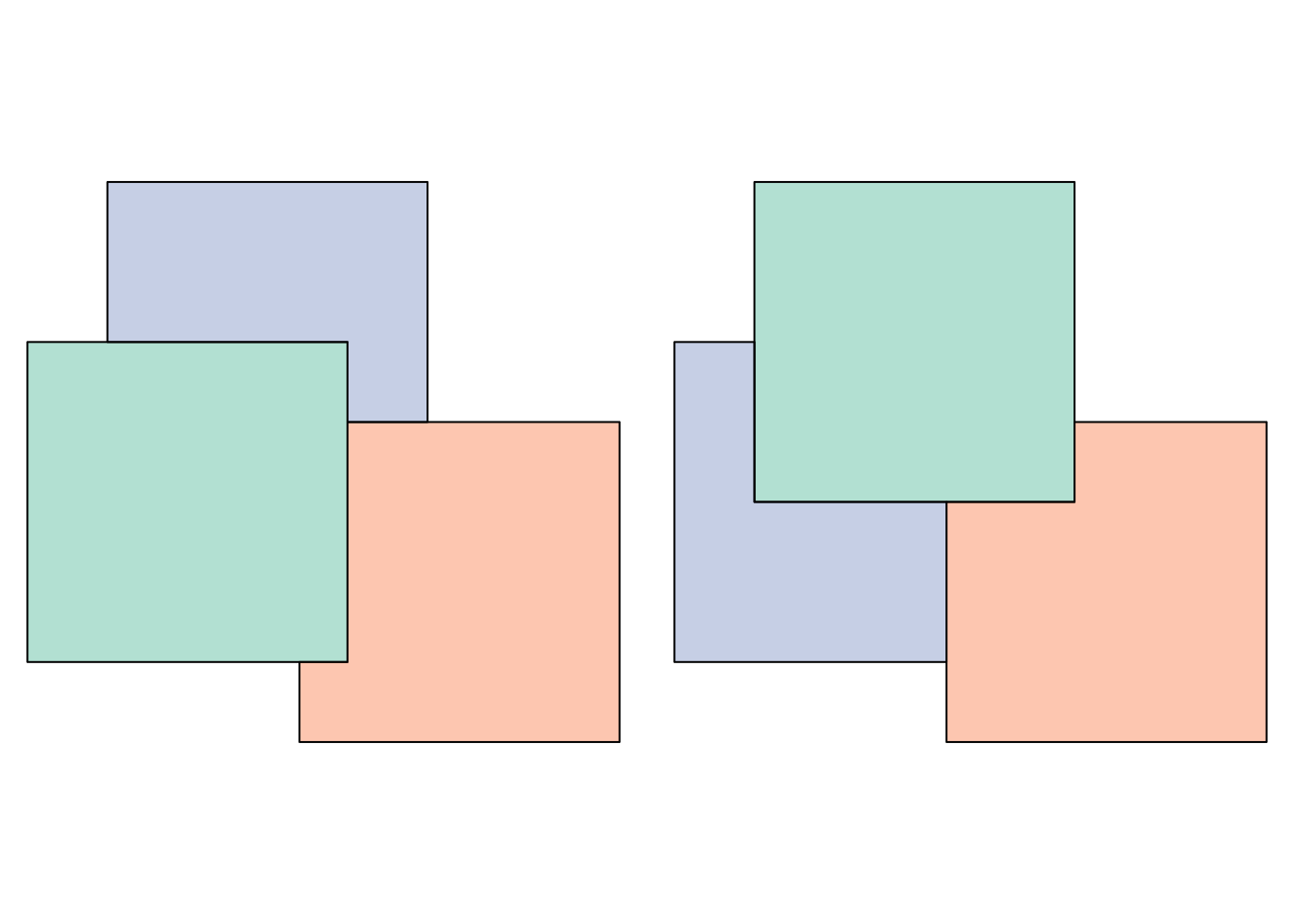
N-ary intersection and difference take a single argument but operate (sequentially) on all pairs, triples, quadruples, etc. Consider the plot in Figure 3.4: how do we identify the area where all three boxes overlap? Using binary intersections gives us intersections for all pairs: 1-1, 1-2, 1-3, 2-1, 2-2, 2-3, 3-1, 3-2, 3-3, but that does not let us identify areas where more than two geometries intersect. Figure 3.4 (right) shows the n-ary intersection: the seven unique, non-overlapping geometries originating from intersection of one, two, or more geometries.
Figure 3.4: Left: three overlapping squares – how do we identify the small box where all three overlap? Right: unique, non-overlapping n-ary intersections
Similarly, one can compute an n-ary difference from a set \(\{s_1, s_2,
s_3, ...\}\) by creating differences \(\{s_1, s_2-s_1, s_3-s_2-s_1,
...\}\). This is shown in Figure 3.5, (left) for the original set, and (right) for the set after reversing its order to make clear that the result here depends on the ordering of the input geometries. Again, resulting geometries do not overlap.
Figure 3.5: Difference between subsequent boxes, left: in original order; right: in reverse order
3.3 Precision
Geometrical operations, such as finding out whether a certain point is on a line, may fail when coordinates are represented by double precision floating point numbers, such as 8-byte doubles used in R. An often chosen remedy is to limit the precision of the coordinates before the operation. For this, a precision model is adopted; the most common is to choose a factor \(p\) and compute rounded coordinates \(c'\) from original coordinates \(c\) by \[c' = \mbox{round}(p \cdot c) / p\]
Rounding of this kind brings the coordinates to points on a regular grid with spacing \(1/p\), which is beneficial for geometric computations. Of course, it also affects all computations like areas and distances, and may turn valid geometries into invalid ones. Which precision values are best for which application is often a matter of common sense combined with trial and error.
3.4 Coverages: tessellations and rasters
The Open Geospatial Consortium defines a coverage as a “feature that acts as a function to return values from its range for any direct position within its spatiotemporal domain” (Baumann, Hirschorn, and Masó 2017). Having a function implies that for every space time “point”, every combination of a spatial point and a moment in time of the spatiotemporal domain, we have a single value for the range. This is a very common situation for spatiotemporal phenomena, a few examples can be given:
boundary disputes aside, at a given time every point in a region (domain) belongs to a single administrative unit (range)
at any given moment in time, every point in a region (domain) has a certain land cover type (range)
every point in an area (domain) has a single surface elevation (range), which could be measured with respect to a given mean sea level surface
every spatiotemporal point in a three-dimensional body of air (domain) has single value for temperature (range)
A caveat here is that because observation or measurement always takes time and requires space, measured values are always an average over a spatiotemporal volume, and hence range variables can rarely be measured for true, zero-volume “points”; for many practical cases however the measured volume is small enough to be considered a “point”. For a variable like land cover type the volume needs to be chosen such that the types distinguished make sense with respect to the measured areal units.
In the first two of the given examples the range variable is categorical, in the last two the range variable is continuous. For categorical range variables, if large connected areas have a constant range value, an efficient way to represent these data is by storing the boundaries of the areas with constant value, such as country boundaries. Although this can be done (and is often done) by a set of simple feature geometries (polygons or multi-polygons), this brings along some challenges:
it is hard to guarantee for such a set of simple feature polygons that they do not overlap, or that there are no unwanted gaps between them
simple features have no way of assigning points on the boundary of two adjacent polygons uniquely to a single polygon, which conflicts with the interpretation as coverage
Topological models
A data model that guarantees no inadvertent gaps or overlaps of polygonal coverages is the topological model, examples of which are found in geographic information systems (GIS) like GRASS GIS or ArcGIS. Topological models store boundaries between polygons only once and register which polygonal area is on either side of a boundary.
Deriving the set of (multi)polygons for each area with a constant range value from a topological model is straightforward; the other way around, reconstructing topology from a set of polygons typically involves setting thresholds on errors and handling gaps or overlaps.
Raster tessellations
A tessellation is a sub-division of a space (area, volume) into smaller elements by ways of polygons. A regular tessellation does this with regular polygons: triangles, squares, or hexagons. Tessellations using squares are commonly used for spatial data and are called raster data. Raster data tessellate each spatial dimension \(d\) into regular cells, formed by left-closed and right-open intervals \(d_i\): \[\begin{equation}
d_i = d_0 + [i \times \delta, (i+1) \times \delta)
\end{equation}\] with \(d_0\) an offset, \(\delta\) the interval (cell or pixel) size, and where the cell index \(i\) is an arbitrary but consecutive set of integers. The \(\delta\) value is often taken negative for the \(y\)-axis (Northing), indicating that raster row numbers increasing Southwards correspond to \(y\)-coordinates increasing Northwards.
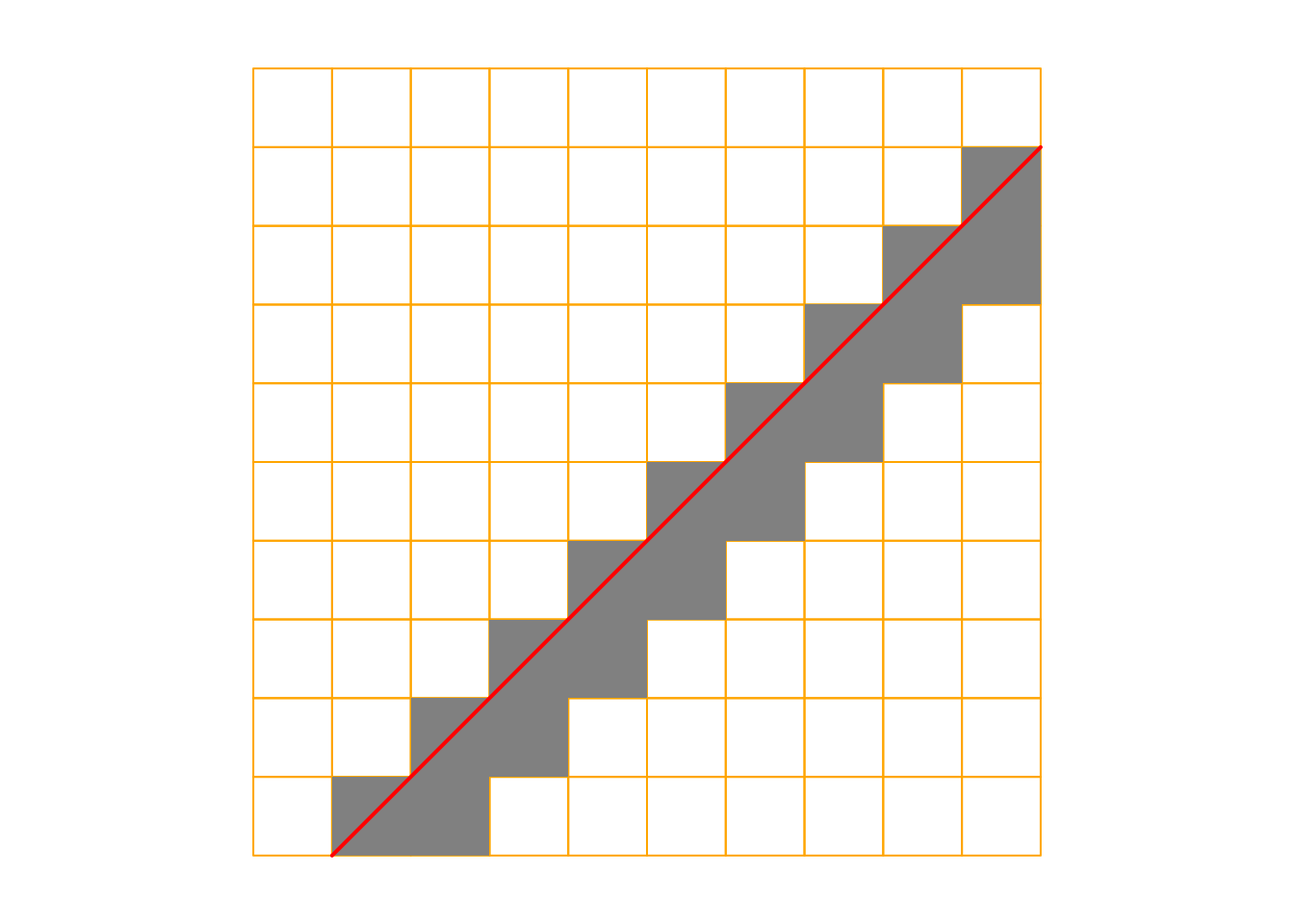
Whereas in arbitrary polygon tessellations the assignment of points to polygons is ambiguous for points falling on a boundary shared by two polygons, using left-closed “[” and right-open “)” intervals in regular tessellations removes this ambiguity. This means that for rasters with negative \(\delta\) values for the \(y\)-coordinate and positive for the \(x\)-coordinate, only the top-left corner point is part of each raster cell. An artifact resulting from this is shown in Figure 3.6.
Figure 3.6: Rasterization artifact: as only top-left corners are part of the raster cell, only cells touching the red line below the diagonal line are rasterized
Tessellating the time dimension with left-closed right-open intervals is very common, and it reflects the implicit assumption underlying time series software such as the xts package in R, where time stamps indicate the start of time intervals. Different models can be combined: one could use simple feature polygons to tessellate space and combine this with a regular tessellation of time in order to cover a space time vector data cube. Raster and vector data cubes are discussed in Chapter 6.
As mentioned above, besides square cells the other two shapes that can lead to regular tessellations of \(R^2\) are triangles and hexagons. On the sphere, there are a few more, including cube, octahedron, icosahedron, and dodecahedron. A spatial index that builds on the cube is s2geometry, the H3 library uses the icosahedron and densifies that with (mostly) hexagons. Mosaics that cover the entire Earth are also called discrete global grids.
3.5 Networks
Spatial networks are typically composed of linear (LINESTRING) elements, but possess further topological properties describing the network coherence:
start- and end-points of a linestring may be connected to other linestring start or end points, forming a set of nodes and edges
edges may be directed, to only allow for connection (flow, transport) in one way
Clementini, Eliseo, Paolino Di Felice, and Peter van Oosterom. 1993. “A Small Set of Formal Topological Relationships Suitable for End-User Interaction.” In Advances in Spatial Databases, edited by David Abel and Beng Chin Ooi, 277–95. Berlin, Heidelberg: Springer Berlin Heidelberg.
Egenhofer, Max J., and Robert D. Franzosa. 1991. “Point-Set Topological Spatial Relations.”International Journal of Geographical Information Systems 5 (2): 161–74. https://doi.org/10.1080/02693799108927841.
Pebesma, Edzer. 2018. “Simple Features for R: Standardized Support for Spatial Vector Data.”The R Journal 10 (1): 439–46. https://doi.org/10.32614/RJ-2018-009.
# Geometries {#sec-geometries}\index{geometry!simple feature}\index{simple feature!definition}Having learned how we represent coordinates systems, we can definehow geometries can be described using these coordinate systems. Thischapter will explain:* _simple features_, a standard that describes point, line, and polygon geometries along with operations on them,* operations on geometries,* coverages, functions of space or space-time,* tesselations, sub-divisions of larger regions into sub-regions, and* networks.Geometries on the sphere are discussed in @sec-spherical, rasters andother rectangular sub-divisions of space or space time are discussedin @sec-datacube.## Simple feature geometries {#sec-simplefeatures}\index{simple feature geometry}\index{simple feature!geometry}Simple feature geometries are a way to describe the geometries of_features_. By _features_ we mean _things_ that have a geometry,potentially implicitly some time properties, and further _attributes_ that couldinclude labels describing the thing and/or values quantitatively measuring it.The main application of simple feature geometries is to describegeometries in two-dimensional space by points, lines, or polygons. The"simple" adjective refers to the fact that the line or polygongeometries are represented by sequences of points connected withstraight lines that do not self-intersect._Simple features access_ is a standard [@sfa; @sfa2; @iso] fordescribing simple feature geometries. It includes:\index{simple feature access}* a class hierarchy* a set of operations* binary and text encodingsWe will first discuss the seven most common simple feature geometrytypes.### The big seven {#sec-seven}\index{simple feature geometry!types}\index{POINT}\index{MULTIPOINT}\index{LINESTRING}\index{MULTILINESTRING}\index{POLYGON}\index{MULTIPOLYGON}\index{GEOMETRYCOLLECTION}The most common simple feature geometries used to represent a _single_ feature are:| type | description ||---------------------------|---------------------------------------------------------------------------|| `POINT` | single point geometry || `MULTIPOINT` | set of points || `LINESTRING` | single linestring (two or more points connected by straight lines) || `MULTILINESTRING` | set of linestrings || `POLYGON` | exterior ring with zero or more inner rings, denoting holes || `MULTIPOLYGON` | set of polygons || `GEOMETRYCOLLECTION` | set of the geometries above |```{r fig-sfgeometries, echo=!knitr::is_latex_output(), message = FALSE}#| fig.cap: "Sketches of the main simple feature geometry types"#| code-fold: truelibrary(sf) |> suppressPackageStartupMessages()par(mfrow = c(2,4))par(mar = c(1,1,1.2,1))# 1p <- st_point(0:1)plot(p, pch = 16)title("point")box(col = 'grey')# 2mp <- st_multipoint(rbind(c(1,1), c(2, 2), c(4, 1), c(2, 3), c(1,4)))plot(mp, pch = 16)title("multipoint")box(col = 'grey')# 3ls <- st_linestring(rbind(c(1,1), c(5,5), c(5, 6), c(4, 6), c(3, 4), c(2, 3)))plot(ls, lwd = 2)title("linestring")box(col = 'grey')# 4mls <- st_multilinestring(list( rbind(c(1,1), c(5,5), c(5, 6), c(4, 6), c(3, 4), c(2, 3)), rbind(c(3,0), c(4,1), c(2,1))))plot(mls, lwd = 2)title("multilinestring")box(col = 'grey')# 5 polygonpo <- st_polygon(list(rbind(c(2,1), c(3,1), c(5,2), c(6,3), c(5,3), c(4,4), c(3,4), c(1,3), c(2,1)), rbind(c(2,2), c(3,3), c(4,3), c(4,2), c(2,2))))plot(po, border = 'black', col = '#ff8888', lwd = 2)title("polygon")box(col = 'grey')# 6 multipolygonmpo <- st_multipolygon(list( list(rbind(c(2,1), c(3,1), c(5,2), c(6,3), c(5,3), c(4,4), c(3,4), c(1,3), c(2,1)), rbind(c(2,2), c(3,3), c(4,3), c(4,2), c(2,2))), list(rbind(c(3,7), c(4,7), c(5,8), c(3,9), c(2,8), c(3,7)))))plot(mpo, border = 'black', col = '#ff8888', lwd = 2)title("multipolygon")box(col = 'grey')# 7 geometrycollectiongc <- st_geometrycollection(list(po, ls + c(0,5), st_point(c(2,5)), st_point(c(5,4))))plot(gc, border = 'black', col = '#ff6666', pch = 16, lwd = 2)title("geometrycollection")box(col = 'grey')```@fig-sfgeometries shows examples of these basicgeometry types. The human-readable, "well-known text" (WKT) representationof the geometries plotted are:\index{geometry!well-known text}\index{geometry!WKT}\index{well-known text}\index{encoding!well-known text}\index{WKT}\index{encoding!WKT}```{r echo=!knitr::is_latex_output(), eval=FALSE}#| code-fold: truepmplsmlspompogc``````POINT (0 1)MULTIPOINT ((1 1), (2 2), (4 1), (2 3), (1 4))LINESTRING (1 1, 5 5, 5 6, 4 6, 3 4, 2 3)MULTILINESTRING ((1 1, 5 5, 5 6, 4 6, 3 4, 2 3), (3 0, 4 1, 2 1))POLYGON ((2 1, 3 1, 5 2, 6 3, 5 3, 4 4, 3 4, 1 3, 2 1), (2 2, 3 3, 4 3, 4 2, 2 2))MULTIPOLYGON (((2 1, 3 1, 5 2, 6 3, 5 3, 4 4, 3 4, 1 3, 2 1), (2 2, 3 3, 4 3, 4 2, 2 2)), ((3 7, 4 7, 5 8, 3 9, 2 8, 3 7)))GEOMETRYCOLLECTION ( POLYGON ((2 1, 3 1, 5 2, 6 3, 5 3, 4 4, 3 4, 1 3, 2 1), (2 2 , 3 3, 4 3, 4 2, 2 2)), LINESTRING (1 6, 5 10, 5 11, 4 11, 3 9, 2 8), POINT (2 5), POINT (5 4))```In this representation, coordinates are separated by space, andpoints by commas. Sets are grouped by parentheses, and separatedby commas. Polygons consist of an outer ring followed by zero ormore inner rings denoting holes.Individual points in a geometry contain at least two coordinates:$x$ and $y$, in that order. If these coordinates refer to ellipsoidalcoordinates, $x$ and $y$ usually refer to longitude and latitude,respectively, although sometimes to latitude and longitude (see@sec-projlib and @sec-axisorder).### Simple and valid geometries, ring direction {#sec-valid}\index{geometry!valid}\index{geometry!simple}\index{valid geometry}\index{simple geometry}Linestrings are called _simple_ when they do not self-intersect:```{r echo=!knitr::is_latex_output()}#| code-fold: true#| collapse: false(ls <- st_linestring(rbind(c(0,0), c(1,1), c(2,2), c(0,2), c(1,1), c(2,0))))c(is_simple = st_is_simple(ls))```Valid polygons and multi-polygons obey all of the following properties:* polygon rings are closed (the last point equals the first)* polygon holes (inner rings) are inside their exterior ring* polygon inner rings maximally touch the exterior ring in single points, not over a line* a polygon ring does not repeat its own path* in a multi-polygon, an external ring maximally touches another exterior ring in single points, not over a lineIf this is not the case, the geometry concerned is not valid. Invalidgeometries typically cause errors when they are processed, but they canusually be repaired to make them valid.A further convention is that the outer ring of a polygon is windedcounter-clockwise, while the holes are winded clockwise, but polygonsfor which this is not the case are still considered valid. Forpolygons on the sphere, the "clockwise" concept is not very useful:if for instance we take the equator as polygon, is the NorthernHemisphere or the Southern Hemisphere "inside"? The conventiontaken here is to consider the area on the left while traversingthe polygon is considered the polygon's inside (see also @sec-ccw).### Z and M coordinates\index{coordinates!z and m}\index{simple feature geometry!z and m}In addition to X and Y coordinates, single points (vertices) ofsimple feature geometries may have:* a `Z` coordinate, denoting altitude, and/or* an `M` value, denoting some "measure"The `M` attribute shall be a property of the vertex. It soundsattractive to encode a time stamp in it for instance to pack movement data(trajectories) in `LINESTRING`s. These become however invalid (or"non-simple") once the trajectory self-intersects, whichhappens when only `X` and `Y` are considered for self-intersections.Both `Z` and `M` are not found often, and software supportto do something useful with them is (still) rare. TheirWKT representations are fairly easily understood:```{r echo=!knitr::is_latex_output()}#| code-fold: true#| collapse: falsest_point(c(1,3,2))st_point(c(1,3,2), dim = "XYM")st_linestring(rbind(c(3,1,2,4), c(4,4,2,2)))```### Empty geometries\index{empty geometry}\index{geometry!empty}A very important concept in the feature geometry framework is that of theempty geometry. Empty geometries arise naturally when we do geometricaloperations (@sec-opgeom), for instance when we want toknow the intersection of `POINT (0 0)` and `POINT (1 1)`: ```{r echo=!knitr::is_latex_output()}#| code-fold: true(e <- st_intersection(st_point(c(0,0)), st_point(c(1,1))))```and it represents essentially the empty set: when combining(unioning) an empty point with other non-empty geometries,it vanishes.All geometry types have a special value representing the empty (typed) geometry, like```{r echo=!knitr::is_latex_output()}#| code-fold: true#| collapse: falsest_point()st_linestring(matrix(1,1,3)[0,], dim = "XYM")```and so on, but they all point to the empty set, differing only in theirdimension (@sec-de9im).### Ten further geometry typesThere are 10 more geometry types which are more rare, but increasingly find implementation:| type | description || ------------------- | -------------------------------------------------- || `CIRCULARSTRING` | The CircularString is the basic curve type, similar to a LineString in the linear world. A single segment requires three points, the start and end points (first and third) and any other point on the arc. The exception to this is for a closed circle, where the start and end points are the same. In this case the second point MUST be the centre of the arc, i.e., the opposite side of the circle. To chain arcs together, the last point of the previous arc becomes the first point of the next arc, just like in LineString. This means that a valid circular string must have an odd number of points greater than 1. || `COMPOUNDCURVE` | A CompoundCurve is a single, continuous curve that has both curved (circular) segments and linear segments. That means that in addition to having well-formed components, the end point of every component (except the last) must be coincident with the start point of the following component. || `CURVEPOLYGON` | Example compound curve in a curve polygon: `CURVEPOLYGON( COMPOUNDCURVE( CIRCULARSTRING(0 0,2 0, 2 1, 2 3, 4 3),(4 3, 4 5, 1 4, 0 0)), CIRCULARSTRING(1.7 1, 1.4 0.4, 1.6 0.4, 1.6 0.5, 1.7 1))` || `MULTICURVE` | A MultiCurve is a 1 dimensional GeometryCollection whose elements are Curves. It can include linear strings, circular strings, or compound strings. || `MULTISURFACE` | A MultiSurface is a 2 dimensional GeometryCollection whose elements are Surfaces, all using coordinates from the same coordinate reference system. || `CURVE` | A Curve is a 1 dimensional geometric object usually stored as a sequence of Points, with the subtype of Curve specifying the form of the interpolation between Points || `SURFACE` | A Surface is a 2 dimensional geometric object || `POLYHEDRALSURFACE` | A PolyhedralSurface is a contiguous collection of polygons, which share common boundary segments || `TIN` | A TIN (triangulated irregular network) is a PolyhedralSurface consisting only of Triangle patches.|| `TRIANGLE` | A Triangle is a polygon with three distinct, non-collinear vertices and no interior boundary |`CIRCULARSTRING`, `COMPOUNDCURVE` and `CURVEPOLYGON` are notdescribed in the SFA standard, but in the [SQL-MM part 3standard](https://www.iso.org/standard/38651.html). Thedescriptions above were copied from the [PostGISmanual](http://postgis.net/docs/using_postgis_dbmanagement.html).\index{CIRCULARSTRING}\index{COMPOUNDCURVE}\index{CURVEPOLYGON}\index{MULTICURVE}\index{MULTISURFACE}\index{CURVE}\index{SURFACE}\index{POLYHEDRALSURFACE}\index{TIN}\index{TRIANGLE}\index{SQL-MM part 3}### Text and binary encodings\index{well-known binary}\index{encoding!well-known binary}\index{WKB}\index{encoding!WKB}Part of the simple feature standard are two encodings: a text anda binary encoding. The well-known text encoding, used above, ishuman-readable. The well-known binary encoding is machine-readable.Well-known binary (WKB) encodings are lossless and typically fasterto work with than text encoding (and decoding), and they are used forinstance in all communications between R package **sf** and the GDAL,GEOS, liblwgeom, and s2geometry libraries (@fig-gdal-fig-nodetails).## Operations on geometries {#sec-opgeom}\index{geometry!operations}Simple feature geometries can be queried for properties, ortransformed or combined into new geometries, and combinations of geometriescan be queried for further properties. This section gives an overviewof the operations entirely focusing on _geometrical_ properties.@sec-featureattributes focuses on the analysis of non-geometricalfeature properties, in relationship to their geometries. Some ofthe material in this section appeared in @rjsf.We can categorise operations on geometries in terms of what theytake as input, and what they return as output. In terms of outputwe have operations that return:* **predicates**: a logical asserting a certain property is `TRUE`* **measures**: a quantity (a numeric value, possibly with measurement unit)* **transformations**: newly generated geometriesand in terms of what they operate on, we distinguish operationsthat are:* **unary** when they work on a single geometry* **binary** when they work on pairs of geometries* **n-ary** when they work on sets of geometries### Unary predicates\index{geometry!predicates}\index{geometry!valid}\index{geometry!predicates!unary}\index{geometry!empty}\index{geometry!simple}\index{geometry!projected}Unary predicates describe a certain property of a geometry.The predicates `is_simple`, `is_valid`, and `is_empty` returnrespectively whether a geometry is simple, valid, or empty. Given acoordinate reference system, `is_longlat` returns whether thecoordinates are geographic or projected. `is(geometry, class)`checks whether a geometry belongs to a particular class.\index[function]{st\_is\_simple}\index[function]{st\_is\_valid}\index[function]{st\_is\_empty}\index[function]{st\_is\_longlat}\index[function]{st\_is}### Binary predicates and DE-9IM {#sec-de9im}\index{geometry!predicates!binary}\index{geometry!DE-9IM}\index{DE-9IM}The Dimensionally Extended Nine-Intersection Model [DE-9IM,@de9im1; @de9im2] is a model that describes the qualitativerelation between any two geometries in two-dimensional space($R^2$). Any geometry has a _dimension_ value that is:* 0 for points, * 1 for linear geometries, * 2 for polygonal geometries, and * F (false) for empty geometriesAny geometry also has an inside (I), a boundary (B), and an exterior (E); theseroles are obvious for polygons, however, for:* **lines** the boundary is formed by the end points, and the insideby all non-end points on the line* **points** have a zero-dimensional inside but no boundary```{r fig-de9im, fig.cap = "DE-9IM: intersections between the interior, boundary, and exterior of a polygon (rows) and of a linestring (columns) indicated by red", echo=!knitr::is_latex_output() }#| code-fold: truelibrary(sf)polygon <- po <- st_polygon(list(rbind(c(0,0), c(1,0), c(1,1), c(0,1), c(0,0))))p0 <- st_polygon(list(rbind(c(-1,-1), c(2,-1), c(2,2), c(-1,2), c(-1,-1))))line <- li <- st_linestring(rbind(c(.5, -.5), c(.5, 0.5)))s <- st_sfc(po, li)par(mfrow = c(3,3))par(mar = c(1,1,1,1))# "1020F1102"# 1: 1plot(s, col = c(NA, 'darkgreen'), border = 'blue', main = expression(paste("I(pol)",intersect(),"I(line) = 1")))lines(rbind(c(.5,0), c(.5,.495)), col = 'red', lwd = 2)points(0.5, 0.5, pch = 1)# 2: 0plot(s, col = c(NA, 'darkgreen'), border = 'blue', main = expression(paste("I(pol)",intersect(),"B(line) = 0")))points(0.5, 0.5, col = 'red', pch = 16)# 3: 2plot(s, col = c(NA, 'darkgreen'), border = 'blue', main = expression(paste("I(pol)",intersect(),"E(line) = 2")))plot(po, col = '#ff8888', add = TRUE)plot(s, col = c(NA, 'darkgreen'), border = 'blue', add = TRUE)# 4: 0plot(s, col = c(NA, 'darkgreen'), border = 'blue', main = expression(paste("B(pol)",intersect(),"I(line) = 0")))points(.5, 0, col = 'red', pch = 16)# 5: Fplot(s, col = c(NA, 'darkgreen'), border = 'blue', main = expression(paste("B(pol)",intersect(),"B(line) = F")))# 6: 1plot(s, col = c(NA, 'darkgreen'), border = 'blue', main = expression(paste("B(pol)",intersect(),"E(line) = 1")))plot(po, border = 'red', col = NA, add = TRUE, lwd = 2)# 7: 1plot(s, col = c(NA, 'darkgreen'), border = 'blue', main = expression(paste("E(pol)",intersect(),"I(line) = 1")))lines(rbind(c(.5, -.5), c(.5, 0)), col = 'red', lwd = 2)# 8: 0plot(s, col = c(NA, 'darkgreen'), border = 'blue', main = expression(paste("E(pol)",intersect(),"B(line) = 0")))points(.5, -.5, col = 'red', pch = 16)# 9: 2plot(s, col = c(NA, 'darkgreen'), border = 'blue', main = expression(paste("E(pol)",intersect(),"E(line) = 2")))plot(p0 / po, col = '#ff8888', add = TRUE)plot(s, col = c(NA, 'darkgreen'), border = 'blue', add = TRUE)```@fig-de9im shows the intersections between the I,B, and E components of a polygon and a linestring indicated by red;the sub-plot title gives the dimension of these intersections (0,1, 2 or F). The relationship between the polygon and the line geometry is theconcatenation of these dimensions:```{r echo=!knitr::is_latex_output()}#| code-fold: true#| collapse: falsest_relate(polygon, line)```where the first three characters are associated with the insideof the _first_ geometry (polygon): @fig-de9im issummarised row-wise.Using this ability to express relationships, we can also querypairs of geometries about particular conditions expressed in a_mask string_. As an example, the string `"*0*******"` would evaluate `TRUE`when the second geometry has one or more boundary _points_ in commonwith the interior of the first geometry; the symbol `*` standing for"any dimensionality" (0, 1, 2 or F). The mask string `"T********"`matches pairs of geometry with intersecting interiors, where thesymbol `T` stands for any non-empty intersection of dimensionality 0,1, or 2.Binary predicates are further described using normal-language verbs,using DE-9IM definitions. For instance, the predicate `equals`corresponds to the relationship `"T*F**FFF*"`. If any two geometriesobey this relationship, they are (topologically) equal, but mayhave a different ordering of nodes.A list of binary predicates, with their meaning for non-empty geometries:|predicate |meaning of A _predicate_ B |inverse of ||------------------------------|-----------------------------------------------------------------|----------------||`contains` |B has no points in the exterior of A _and_ the insides of A and B have at least one point in common| `within`||`contains_properly` |A contains B _and_ B has no points in common with the boundary of A| ||`covers` |B has no points in the exterior of A| `covered_by`||`covered_by` |Inverse of `covers`| `covers`||`crosses` |A and B have some but not all interior points in common| ||`disjoint` |A and B have no points in common| `intersects`||`equals` |A and B are topologically equal: node order or number of nodes may differ; identical to A contains B _and_ A within B||`equals_exact` |A equal B _and_ A and B have identical node order| ||`intersects` |A and B are not disjoint| `disjoint`||`is_within_distance` |the shortest distance from A to B is within a given distance||`within` |A has no points in the exterior of B, _and_ the insides of A and B have at least one point in common| `contains`||`touches` |A and B have at least one boundary point but no interior points in common| ||`overlaps` |A and B have the same dimension and some but not all points in common; the dimension of the common points is identical to that of A and B| ||`relate` |Given a mask string, return whether A _relate_ B adheres to its pattern| |\index[function]{st\_contains}\index[function]{st\_contains\_properly}\index[function]{st\_covers}\index[function]{st\_covered\_by}\index[function]{st\_crosses}\index[function]{st\_disjoint}\index[function]{st\_equals}\index[function]{st\_equals\_exact}\index[function]{st\_intersects}\index[function]{st\_is\_within\_distance}\index[function]{st\_within}\index[function]{st\_touches}\index[function]{st\_overlaps}\index[function]{st\_relate}The [Wikipedia DE-9IM page](https://en.wikipedia.org/wiki/DE-9IM)provides the `relate` patterns for each of these verbs. They areimportant to check out; for instance _covers_ and _contains_ (andtheir inverses) are often not completely intuitive:* if A _contains_ B, B has no points in common with the exterior _orboundary_ of A* if A _covers_ B, B has no points in common with the exterior of AThis implies for instance that a polygon covers its own boundary, butdoes not contain it.### Unary measures\index{geometry!measures!unary}Unary measures return a measure or quantity that describes a property ofthe geometry:|measure |returns ||---------------------|--------------------------------------------------------------||`dimension` |0 for points, 1 for linear, 2 for polygons, possibly `NA` for empty geometries||`area` |the area of a geometry||`length` |the length of a linear geometry|\index[function]{st\_dimension}\index[function]{st\_area}\index[function]{st\_length}### Binary measures\index{geometry!measures!binary}`distance` returns the distance between pairs of geometries.The qualitative measure `relate` (without mask) gives the relationpattern. A description of the geometrical relationship between twogeometries is given in @sec-de9im.\index[function]{st\_distance}\index[function]{st\_relate}### Unary transformers\index{geometry!transformers!unary}Unary transformations work on a per-geometry basis, and return for each geometry a new geometry.|transformer |returns a geometry ... ||-----------------------------|----------------------------------------------------------------------------------||`centroid`|of type `POINT` with the geometry's centroid||`buffer`|that is larger (or smaller) than the input geometry, depending on the buffer size||`jitter` |that was moved in space a certain amount, using a bivariate uniform distribution||`wrap_dateline`|cut into pieces that no longer cover or cross the dateline||`boundary`|with the boundary of the input geometry||`convex_hull`|that forms the convex hull of the input geometry (@fig-vor) ||`line_merge`|after merging connecting `LINESTRING` elements of a `MULTILINESTRING` into longer `LINESTRING`s.||`make_valid`|that is valid ||`node`|with added nodes to linear geometries at intersections without a node; only works on individual linear geometries||`point_on_surface`|with a (arbitrary) point on a surface||`polygonize`|of type polygon, created from lines that form a closed ring||`segmentize`|a (linear) geometry with nodes at a given density or minimal distance||`simplify`|simplified by removing vertices/nodes (lines or polygons)||`split`|that has been split with a splitting linestring||`transform`|transformed or convert to a new coordinate reference system (@sec-cs)||`triangulate`|with Delauney triangulated polygon(s) (@fig-vor) ||`voronoi`|with the Voronoi tessellation of an input geometry (@fig-vor) ||`zm`|with removed or added `Z` and/or `M` coordinates||`collection_extract`|with sub-geometries from a `GEOMETRYCOLLECTION` of a particular type||`cast`|that is converted to another type||`+`|that is shifted over a given vector||`*`|that is multiplied by a scalar or matrix|```{r fig-vor, echo = !knitr::is_latex_output()}#| fig.cap: "For a set of points, left: convex hull (red); middle: Voronoi polygons; right: Delauney triangulation"#| code-fold: true#| out.width: 60%par(mar = rep(0,4), mfrow = c(1, 3))set.seed(133331)mp <- st_multipoint(matrix(runif(20), 10))plot(mp, cex = 2)plot(st_convex_hull(mp), add = TRUE, col = NA, border = 'red')box()plot(mp, cex = 2)plot(st_voronoi(mp), add = TRUE, col = NA, border = 'red')box()plot(mp, cex = 2)plot(st_triangulate(mp), add = TRUE, col = NA, border = 'darkgreen')box()```\index[function]{st\_centroid}\index[function]{st\_buffer}\index[function]{st\_jitter}\index[function]{st\_wrap\_dateline}\index[function]{st\_boundary}\index[function]{st\_convex\_hull}\index[function]{st\_line\_merge}\index[function]{st\_make\_valid}\index[function]{st\_node}\index[function]{st\_point\_on\_surface}\index[function]{st\_polygonize}\index[function]{st\_segmentize}\index[function]{st\_simplify}\index[function]{st\_split}\index[function]{st\_transform}\index[function]{st\_triangulate}\index[function]{st\_voronoi}\index[function]{st\_zm}\index[function]{st\_collection\_extract}\index[function]{st\_cast}### Binary transformers {#sec-bintrans}\index{geometry!transformers!binary}Binary transformers are functions that return a geometry based onoperating on a pair of geometries. They include:|function |returns |infix operator||-------------------|-----------------------------------------------------------|:------------:||`intersection` |the overlapping geometries for pair of geometries |`&`||`union` |the combination of the geometries; removes internal boundaries and duplicate points, nodes or line pieces|`|`||`difference` |the geometries of the first after removing the overlap with the second geometry|`/`||`sym_difference` |the combinations of the geometries after removing where they intersect; the negation (opposite) of `intersection`|`%/%`|\index[function]{st\_intersection}\index[function]{st\_union}\index[function]{st\_difference}\index[function]{st\_sym\_difference}### N-ary transformers {#sec-nary}\index{geometry!transformers!n-ary}N-ary transformers operate on sets of geometries.`union` can be applied to a set of geometries to return itsgeometrical union. Otherwise, any set of geometries can be combinedinto a `MULTI`-type geometry when they have equal dimension, orelse into a `GEOMETRYCOLLECTION`. Without unioning, this maylead to a geometry that is not valid, for instance when two polygonrings have a boundary line in common.\index[function]{st\_union!n-ary}\index[function]{st\_intersection!n-ary}\index[function]{st\_difference!n-ary}N-ary `intersection` and `difference` take a single argumentbut operate (sequentially) on all pairs, triples, quadruples, etc.Consider the plot in @fig-boxes: how do we identifythe area where all three boxes overlap? Using binary intersectionsgives us intersections for all pairs: 1-1, 1-2, 1-3, 2-1, 2-2, 2-3,3-1, 3-2, 3-3, but that does not let us identify areas where more thantwo geometries intersect.@fig-boxes (right) shows the n-ary intersection: the sevenunique, non-overlapping geometries originating from intersectionof one, two, _or more_ geometries.```{r fig-boxes, eval=TRUE, echo=!knitr::is_latex_output()}#| code-fold: true#| out.width: 50%#| fig.cap: "Left: three overlapping squares -- how do we identify the small box where all three overlap? Right: unique, non-overlapping n-ary intersections"par(mar = rep(.1, 4), mfrow = c(1, 2))sq <- function(pt, sz = 1) st_polygon(list(rbind(c(pt - sz), c(pt[1] + sz, pt[2] - sz), c(pt + sz), c(pt[1] - sz, pt[2] + sz), c(pt - sz))))x <- st_sf(box = 1:3, st_sfc(sq(c(0, 0)), sq(c(1.7, -0.5)), sq(c(0.5, 1))))plot(st_geometry(x), col = NA, border = sf.colors(3, categorical = TRUE), lwd = 3)plot(st_intersection(st_geometry(x)), col = sf.colors(7, categorical=TRUE, alpha = .5))```Similarly, one can compute an n-ary _difference_ from a set $\{s_1, s_2,s_3, ...\}$ by creating differences $\{s_1, s_2-s_1, s_3-s_2-s_1,...\}$. This is shown in @fig-diff, (left) for the originalset, and (right) for the set after reversing its order to make clear thatthe result here depends on the ordering of the input geometries. Again,resulting geometries do not overlap.```{r fig-diff, echo=!knitr::is_latex_output()}#| code-fold: true#| out.width: 50%#| fig.cap: "Difference between subsequent boxes, left: in original order; right: in reverse order"par(mar = rep(.1, 4), mfrow = c(1, 2)) xg <- st_geometry(x)plot(st_difference(xg), col = sf.colors(3, alpha = .5, categorical=TRUE))plot(st_difference(xg[3:1]), col = sf.colors(3, alpha = .5, categorical=TRUE))```## Precision {#sec-precision}\index{precisions}\index{coordinates!precisions}\index[function]{st\_precision}Geometrical operations, such as finding out whether a certainpoint is on a line, may fail when coordinates are represented bydouble precision floating point numbers, such as 8-byte doublesused in R. An often chosen remedy is to limit the precision of thecoordinates before the operation. For this, a _precision model_is adopted; the most common is to choose a factor $p$ and computerounded coordinates $c'$ from original coordinates $c$ by$$c' = \mbox{round}(p \cdot c) / p$$Rounding of this kind brings the coordinates to points on aregular grid with spacing $1/p$, which is beneficial for geometriccomputations. Of course, it also affects all computations likeareas and distances, and may turn valid geometries into invalidones. Which precision values are best for which application isoften a matter of common sense combined with trial and error. ## Coverages: tessellations and rasters {#sec-coverages}\index{coverage}The Open Geospatial Consortium defines a _coverage_ as a "featurethat acts as a function to return values from its range for anydirect position within its spatiotemporal domain" [@ogccov]. Havinga _function_ implies that for every space time "point", every combinationof a spatial point and a moment in time of the spatiotemporal domain,we have a _single_ value for the range. This is a very common situationfor spatiotemporal phenomena, a few examples can be given:* boundary disputes aside, at a given time every point in a region (domain) belongs to a single administrative unit (range)* at any given moment in time, every point in a region (domain) has a certain _land cover type_ (range)* every point in an area (domain) has a single surface elevation (range), which could be measured with respect to a given mean sea level surface* every spatiotemporal point in a three-dimensional body of air (domain) has single value for temperature (range)A caveat here is that because observation or measurement always takestime and requires space, measured values are always an average overa spatiotemporal volume, and hence range variables can rarely bemeasured for true, zero-volume "points"; for many practical caseshowever the measured volume is small enough to be considered a"point". For a variable like _land cover type_ the volume needs tobe chosen such that the types distinguished make sense with respectto the measured areal units.In the first two of the given examples the range variable is_categorical_, in the last two the range variable is _continuous_.For categorical range variables, if large connected areas have aconstant range value, an efficient way to represent these datais by storing the boundaries of the areas with constant value, suchas country boundaries. Although this can be done (and is often done)by a set of simple feature geometries (polygons or multi-polygons),this brings along some challenges:* it is hard to guarantee for such a set of simple feature polygons that they do not overlap, or that there are no unwanted gaps between them* simple features have no way of assigning points _on_ the boundary of two adjacent polygons uniquely to a single polygon, which conflicts with the interpretation as coverage### Topological models\index{topology}A data model that guarantees no inadvertent gaps or overlaps ofpolygonal coverages is the _topological_ model, examples of whichare found in geographic information systems (GIS) like GRASS GISor ArcGIS. Topological models store boundaries between polygonsonly once and register which polygonal area is on either sideof a boundary. Deriving the set of (multi)polygons for each area with a constantrange value from a topological model is straightforward; the otherway around, reconstructing topology from a set of polygons typicallyinvolves setting thresholds on errors and handling gaps or overlaps.### Raster tessellations\index{tesselation}\index{coverage!tesselation}\index{polygon!tesselation}\index{raster!tesselation}A tessellation is a sub-division of a space (area, volume) intosmaller elements by ways of polygons. A regular tessellationdoes this with regular polygons: triangles, squares, or hexagons.Tessellations using squares are commonly used for spatial dataand are called _raster data_. Raster datatessellate each spatial dimension $d$ into regular cells,formed by left-closed and right-open intervals $d_i$:\begin{equation}d_i = d_0 + [i \times \delta, (i+1) \times \delta)\end{equation}with $d_0$ an offset, $\delta$ the interval (cell orpixel) size, and where the cell index $i$ is an arbitrary butconsecutive set of integers. The $\delta$ value is often takennegative for the $y$-axis (Northing), indicating that rasterrow numbers increasing Southwards correspond to $y$-coordinatesincreasing Northwards.Whereas in arbitrary polygon tessellations the assignment of pointsto polygons is ambiguous for points falling on a boundary sharedby two polygons, using left-closed "[" and right-open ")" intervalsin regular tessellations removes this ambiguity. This means that forrasters with negative $\delta$ values for the $y$-coordinate andpositive for the $x$-coordinate, only the top-left corner pointis part of each raster cell. An artifact resulting from this isshown in @fig-rasterizeline.```{r fig-rasterizeline, echo=!knitr::is_latex_output()}#| out.width: 50%#| fig.cap: "Rasterization artifact: as only top-left corners are part of the raster cell, only cells touching the red line below the diagonal line are rasterized"#| code-fold: truelibrary(stars) |> suppressPackageStartupMessages()par(mar = rep(1, 4))ls <- st_sf(a = 2, st_sfc(st_linestring(rbind(c(0.1, 0), c(1, .9)))))grd <- st_as_stars(st_bbox(ls), nx = 10, ny = 10, xlim = c(0, 1.0), ylim = c(0, 1), values = -1)r <- st_rasterize(ls, grd, options = "ALL_TOUCHED=TRUE")r[r == -1] <- NAplot(st_geometry(st_as_sf(grd)), border = 'orange', col = NA, reset = FALSE, key.pos = NULL)plot(r, axes = FALSE, add = TRUE, breaks = "equal", main = NA) # ALL_TOUCHED=FALSE;plot(ls, add = TRUE, col = "red", lwd = 2)```\index{tesselation!time}Tessellating the time dimension with left-closed right-open intervalsis very common, and it reflects the implicit assumption underlyingtime series software such as the **xts** package in R, where timestamps indicate the start of time intervals. Different models canbe combined: one could use simple feature polygons to tessellatespace and combine this with a regular tessellation of time in orderto cover a space time _vector data cube_. Raster and vector datacubes are discussed in @sec-datacube.As mentioned above, besides square cells the other two shapesthat can lead to regular tessellations of $R^2$ are trianglesand hexagons. On the sphere, there are a few more, including cube,octahedron, icosahedron, and dodecahedron. A spatial index thatbuilds on the cube is [s2geometry](https://s2geometry.io/), the[H3 library](https://eng.uber.com/h3/) uses the icosahedron anddensifies that with (mostly) hexagons. Mosaics that cover the entireEarth are also called _discrete global grids_.## Networks\index{networks}Spatial networks are typically composed of linear (`LINESTRING`)elements, but possess further topological properties describingthe network coherence:* start- and end-points of a linestring may be connected to other linestringstart or end points, forming a set of nodes and edges* edges may be directed, to only allow for connection (flow,transport) in one wayR packages including **osmar** [@R-osmar], **stplanr** [@R-stplanr], and**sfnetworks** [@R-sfnetworks] provide functionality for constructingnetwork objects, and working with them, including computation of shortest orfastest routes through a network. Package **spatstat** [@R-spatstat;@baddeley2015spatial] has infrastructure for analysing pointpatterns on linear networks (@sec-pointpatterns). Chapter 12 of@geocomp has a transportation application using networks.## Exercises For the following exercises, use R where possible.1. Give two examples of geometries in 2-D (flat) space that cannot be represented as simple feature geometries, and create a plot of them.2. Recompute the coordinates 10.542, 0.01, 45321.6789 using precision values 1, 1e3, 1e6, and 1e-2.3. Describe a practical problem for which an n-ary intersection would be needed. 4. How can you create a Voronoi diagram (@fig-vor) that has one closed polygons for every single point?5. Give the unary measure `dimension` for geometries `POINT Z (0 1 1)`, `LINESTRING Z (0 0 1,1 1 2)`, and `POLYGON Z ((0 0 0,1 0 0,1 1 0,0 0 0))`6. Give the DE-9IM relation between `LINESTRING(0 0,1 0)` and `LINESTRING(0.5 0,0.5 1)`; explain the individual characters.7. Can a set of simple feature polygons form a coverage? If so, under which constraints?8. For the `nc` counties in the dataset that comes with R package **sf**, find the points touched by four counties.9. How would @fig-rasterizeline look like if $\delta$ for the $y$-coordinate was positive?